
Introduction
We have built a sensor calibration platform for sensor packets made by GIM Robotics. The calibration mount has three degrees of freedom: X, Y, and Z, each of which have ±45 degrees of movement and can be controlled with a computer connected to the self made PCB via USB-C connection. The prototype utilizes ROS user interface to control the calibration mount movements and to display data received by a 9dof sensor and three magnetic encoders connected to the NEMA23 stepper motors.
Physical device
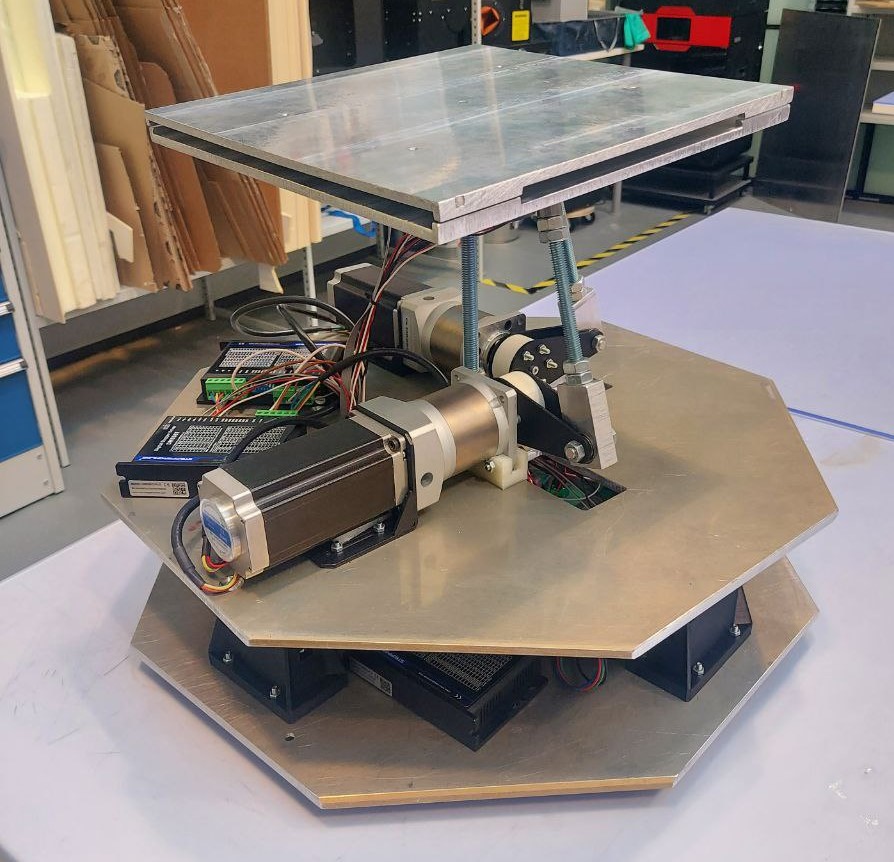
The sensor calibration mount has three separate layers of which the topmost is a 30 x 30 cm surface reserved for mounting sensor packets by GIM. The second layer has two NEMA23 stepper motors that are responsible for the X and Y movements with gearboxes that have a 20:1 gear-ratio as well as drivers for the motors. The bottom layer has a power supply, a third NEMA23 stepper motor connected to a worm gear with its driver, and the PCB that controls everything. Most of the parts are completely self-designed and built using aluminium and 3D-printer. This device is an absolute beast: 50 cm wide and over 30 cm tall and weighs approximately 30 kilograms.
PCB
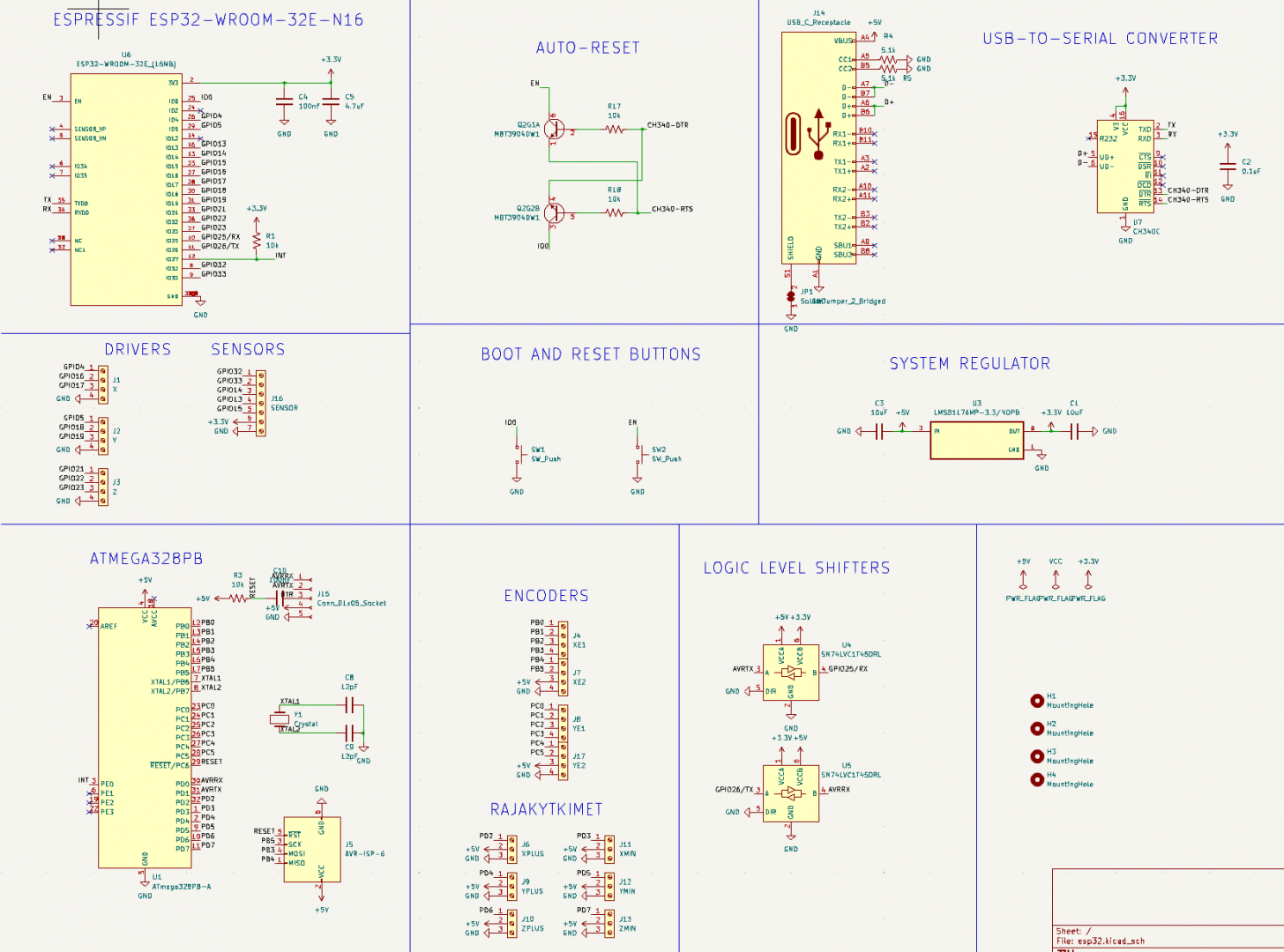
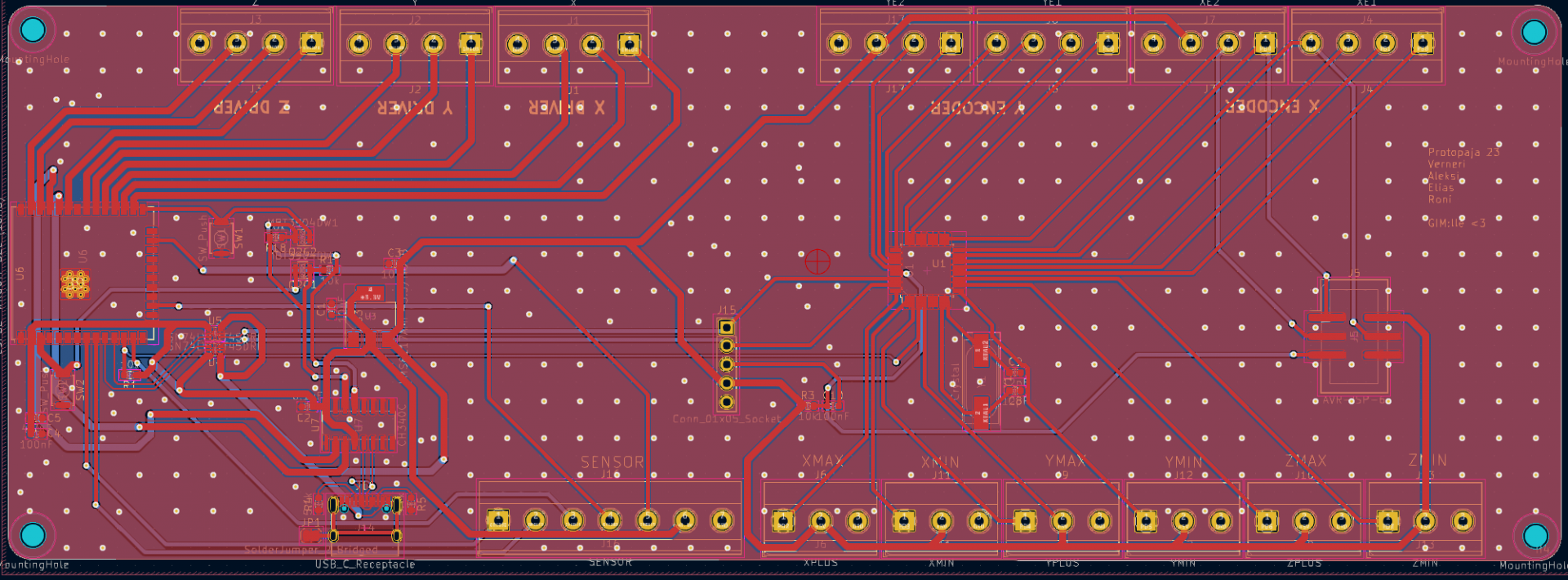
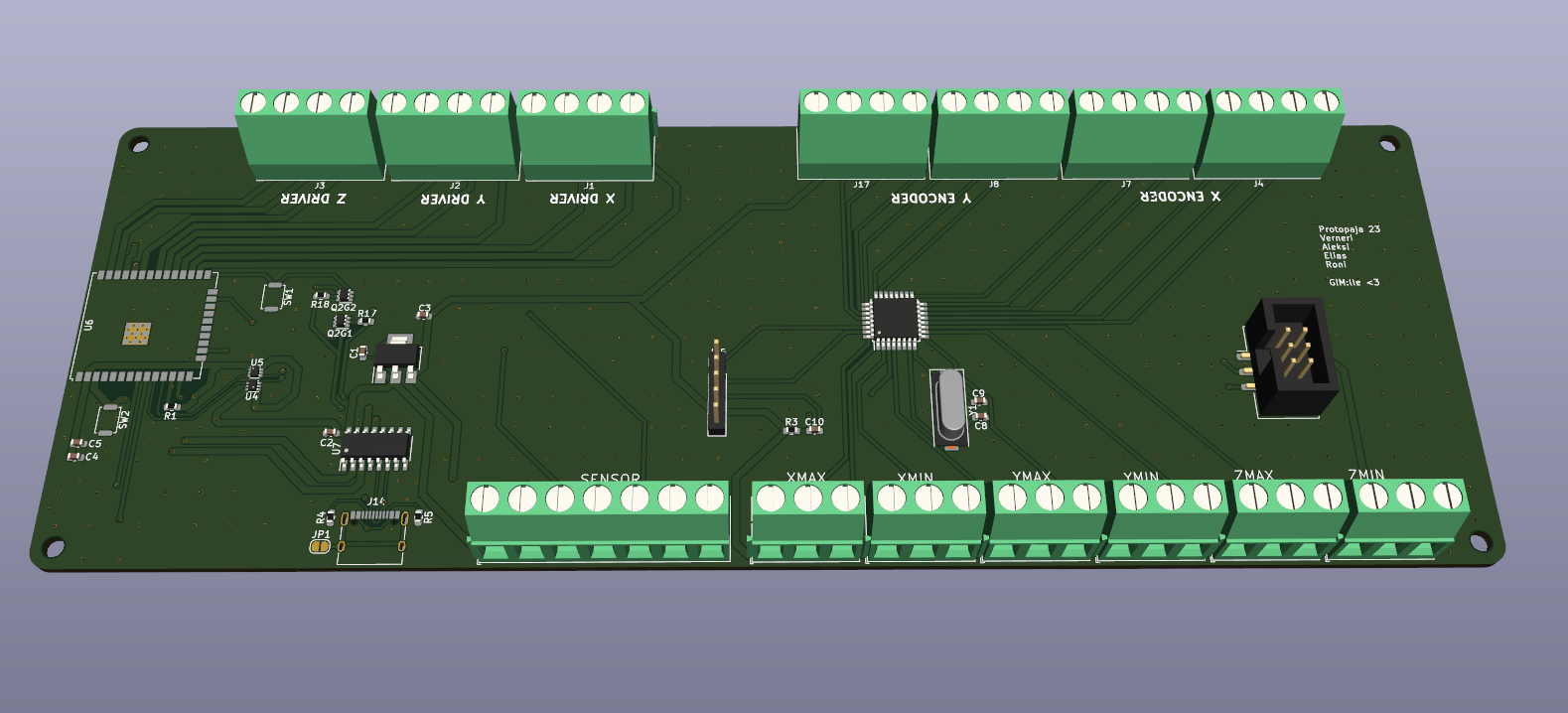
The PCB was designed using KiCad 7.0 and is based on the ESP32-WROOM-32E -module. The module controls the three stepper motors through three drivers and also receives data from the 9dof sensor and the Z-axis magnetic encoder. The PCB also has an ATMEGA328PB-module working as a GPIO expander and receives data from the X and Y magnetic encoders as well as from four limit switches supervising the X and Y movements. All of the wiring to the PCB is connected via screw terminals.
Programming
Unfortunately the programming wasn’t finished in time nor was it tested by the person making it. Thus this is an avenue that GIM Robotics can make clear improvements on in the future.
Team Members:
Aleksi Saajakari
Verneri Turkki
Elias Lindberg
Roni Vallius
Files and Links:
License: MIT License