

Project Description
In practice, our mission was to build a module to a MiR robot called Veera which uses RFID-technology (Radio Frequency Identification) to scan the books. Every book in Oodi has an HF (High Frequency) tag, which can respond to an RFID-reader. RFID tags are used in other libraries too and there are even a few commercial RFID-based robot manufacturers. Our module could scan the book and produce the file containing the information of the book and the scanning timestamp into a CSV file for the librarian’s inquiry.
Through the produced file, the librarian at Oodi library is now able to locate the book whether it is in the correct position, and which time is the book scanned. It facilitates the task of the librarian and liberates them from doing an impossibly laborious work of manually scanning through around 100000 books, and their work could be allocated into another tasks.
Scanning system
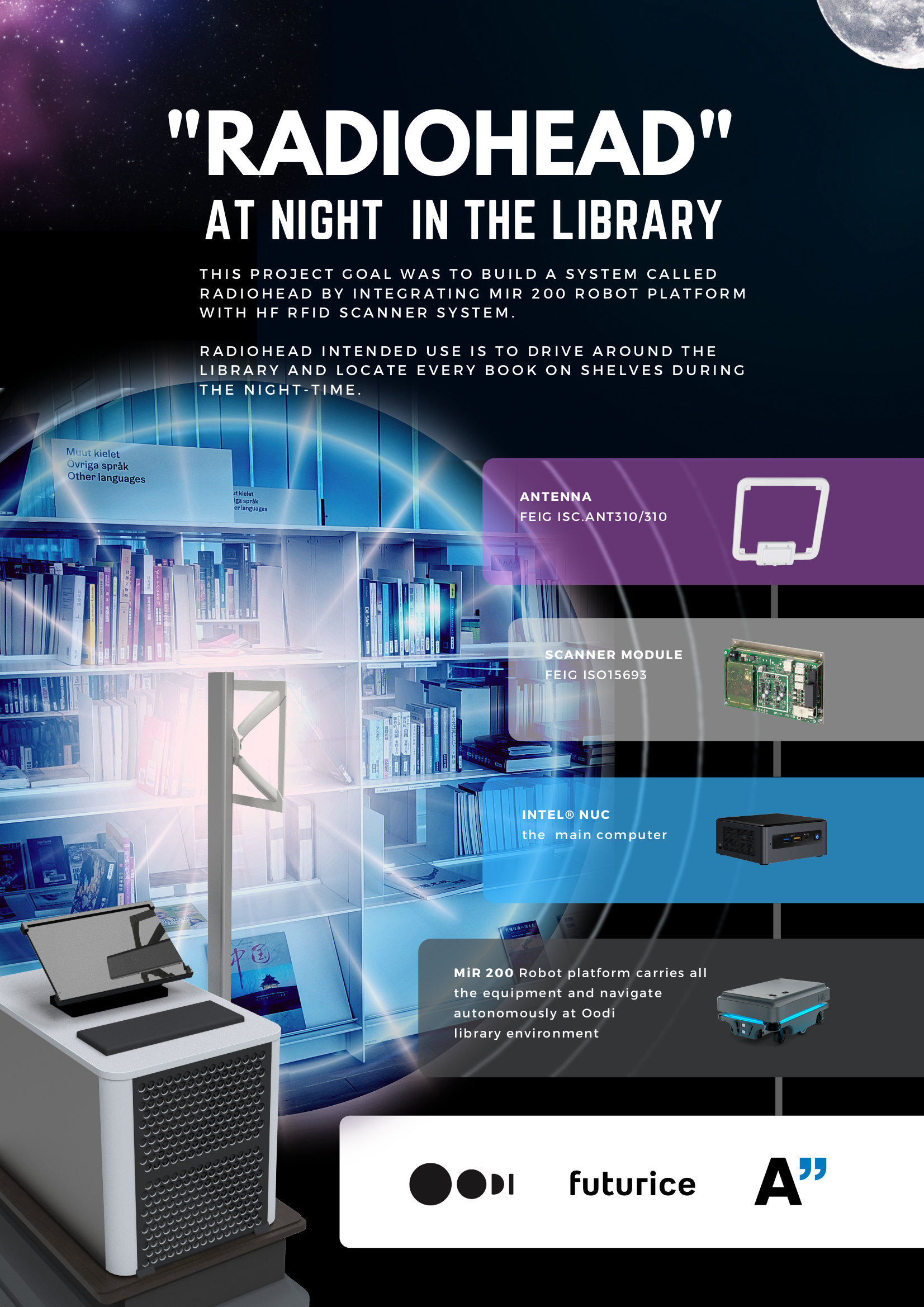
We build a module called “RadioHead” and attach it on top of MiR 200 robot platform. Based on the robot having a pre-scanned map, the module can be driven within the library region to each of the available shelves. At each shelf, the module scans the books using electromagnetic induction technology, and with the combination of the location-related file obtained by the MiR-200 platform, a final CSV file is produced containing the information of the book and scanning details, including the book ID, X-coordinate, Y-coordinate, orientation (in degrees), shelf level, data block, RSSI (received signal strength indication) and timestamp. RH scanner system can read perpendicularly-aligned HF RFID tags from a distance ~ 30cm.
Components
The main components of the system include MiR-200 robotic platform, FEIG RFID antenna, HF reader module, and Intel NUC computer.



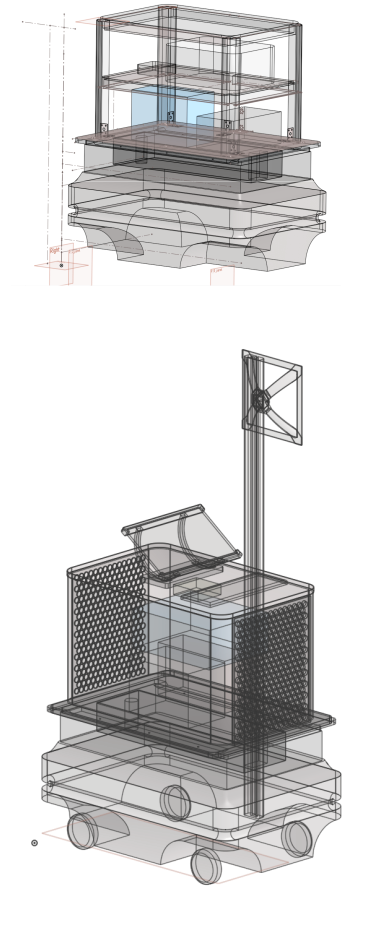
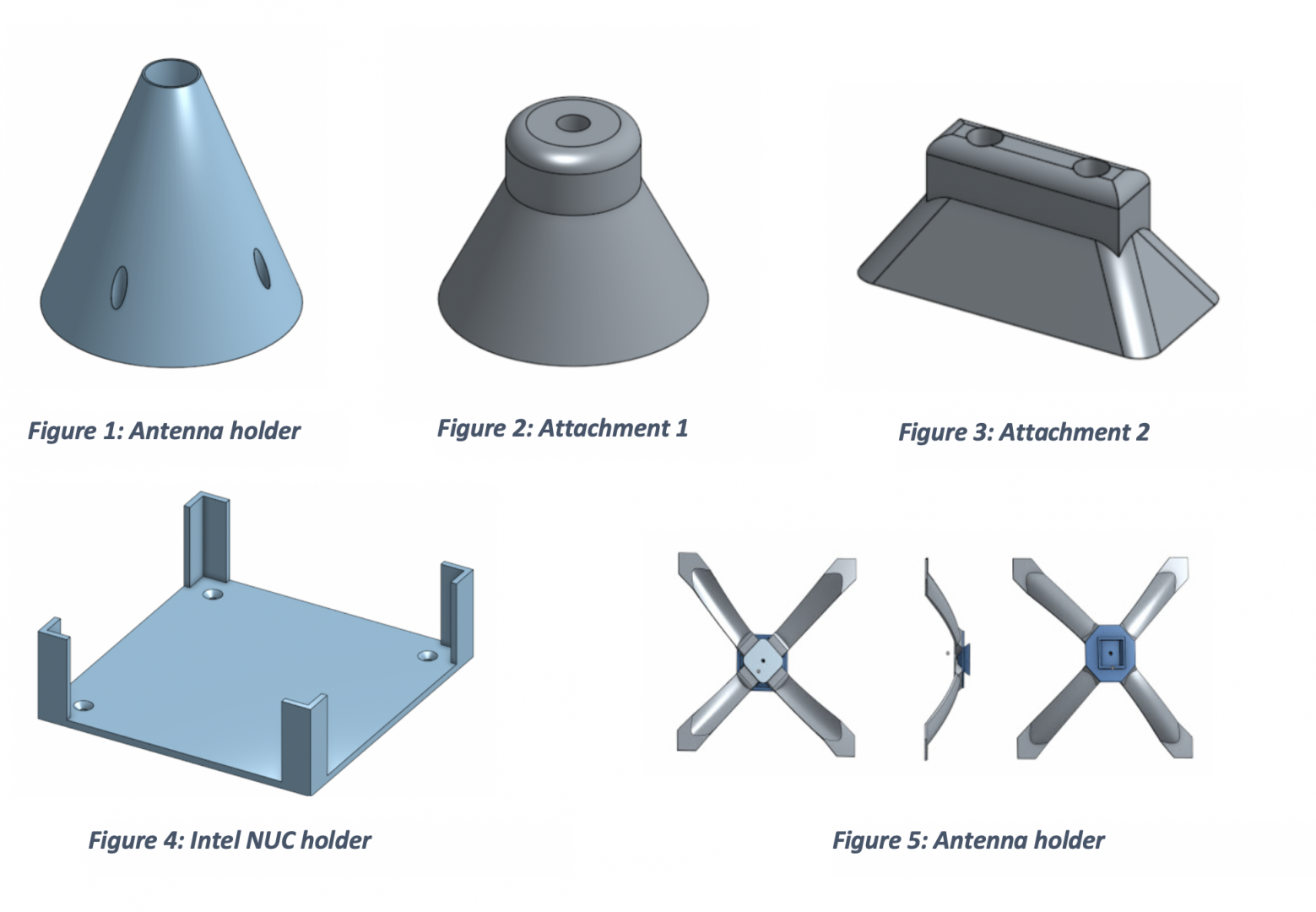
3D-models
The 3D-models were designed using Onshape and produced to be printed or work as an example. Models printed were made of pla plastic and the printers that we used to print the models were Ender 3 Pro, Ultimaker S5 and Ultimaker 2+.
Hardware Architecture
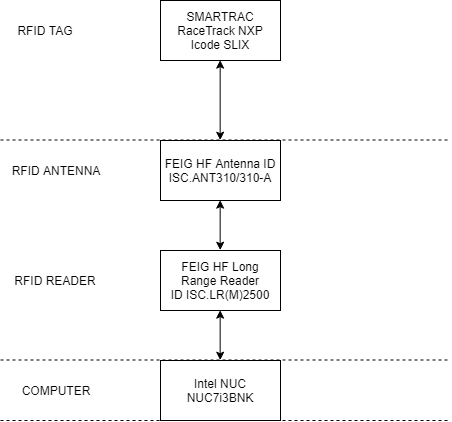
The hardware architecture consists of the main computer, RFID reader module, RFID Antenna and RFID tag.
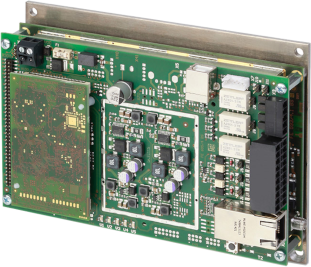
Reader Module Architecture
The antenna is connected to the Intel NUC via a USB port. Then the computer processes the data sent by the antenna obtained from the scanning and combines it into a CSV file, which contains Book_ID, X_Y coordinate, orientation (in degrees), timestamp, data block and received signal strength indication (RSSI).
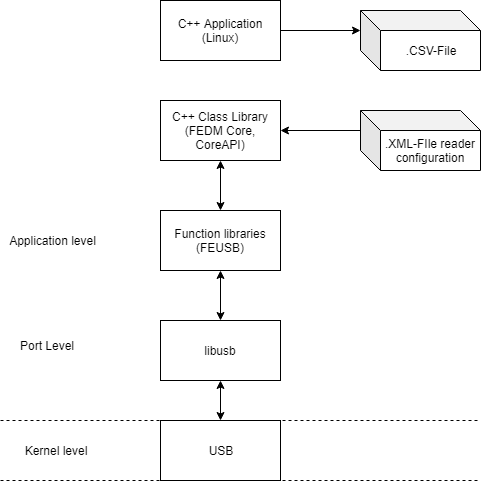
Overview of the software operation
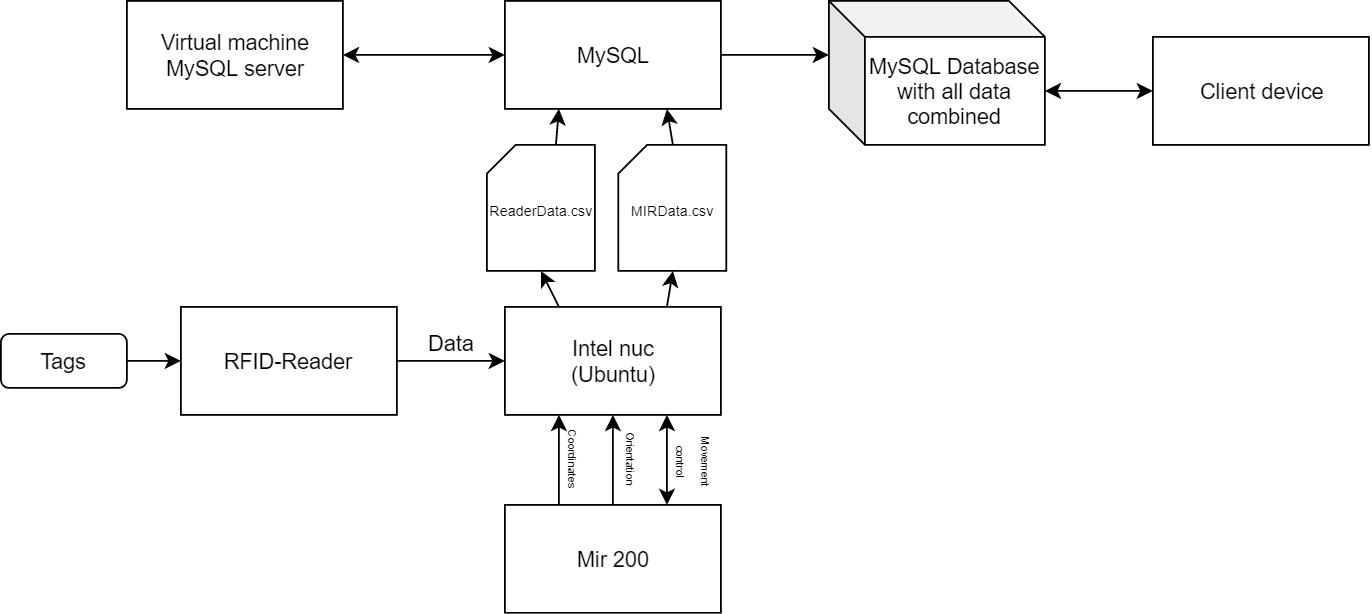
The Intel NUC is the main computing unit that is used as a connection between the FEIG electronics RFID-reader and MiR-200 platform. It also collects all the data and after that saves it on MySQL server. The MySQL server then processes the data and combines them together by their timestamp data. When the final combined database had been created, other client devices can use that database to find book locations.
Showcase and operational videos
Manually take the book out of the shelf and scan for the book reference inquiry
The RadioHead attached to the MiR-200 platform in operation
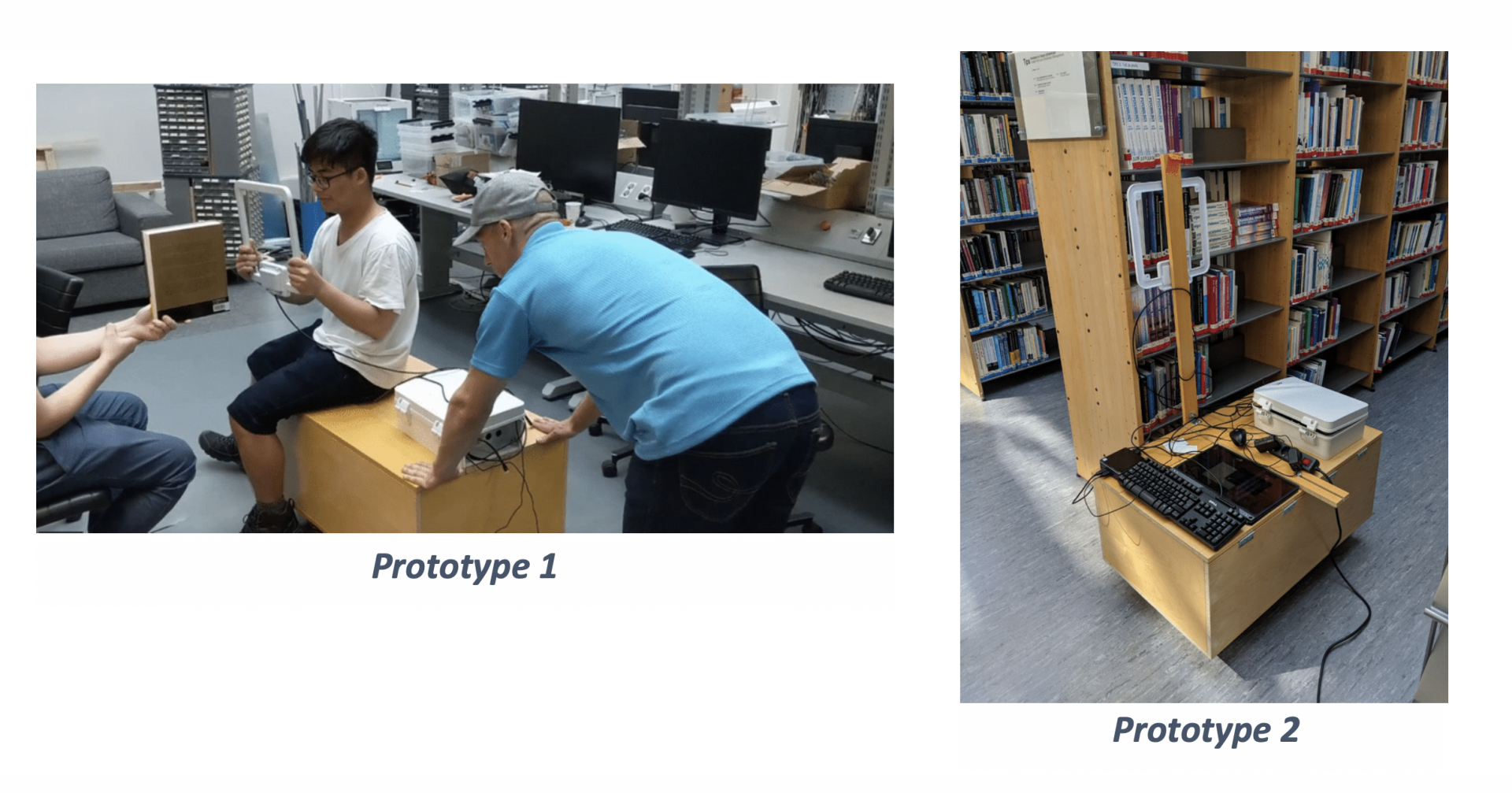
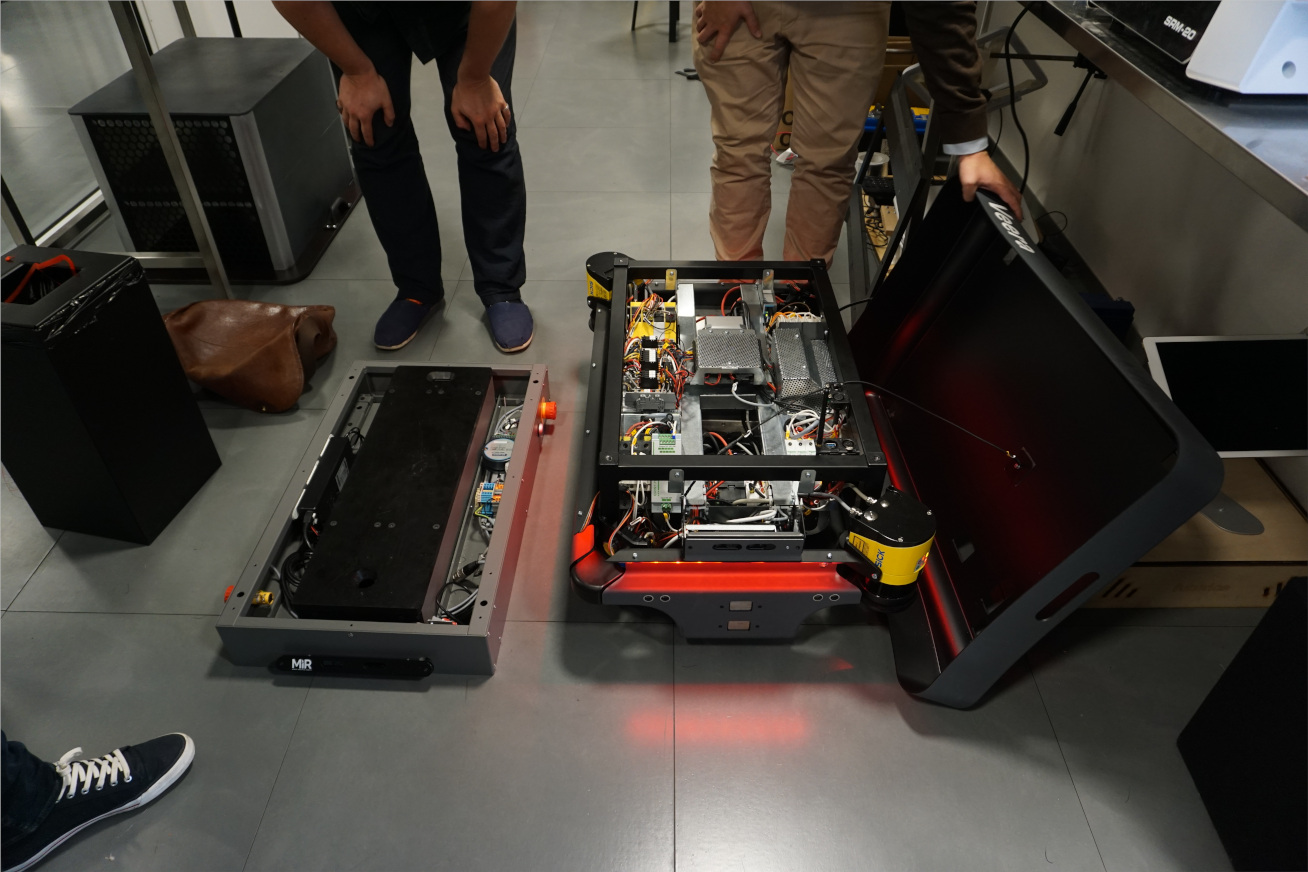
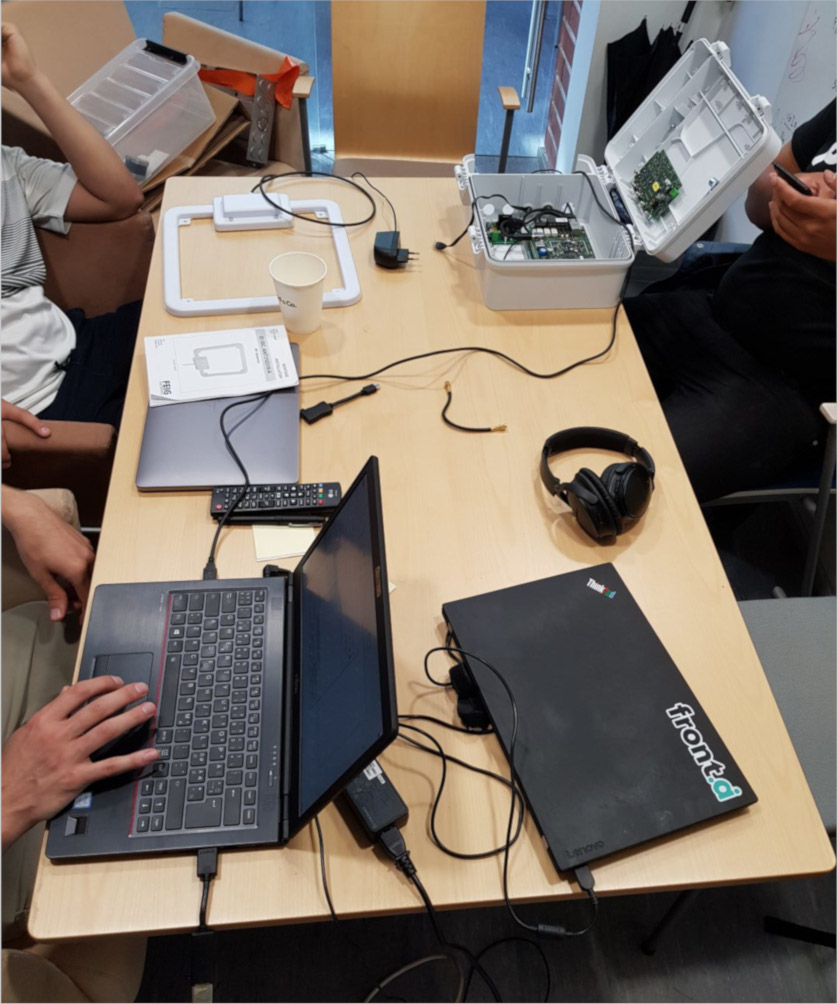
Progress pictures
Here are some pictures demonstrating the evolution of our prototype from prototype 1 to prototype 4:

Credits and Licences
The project, as part of the summer course ELEC-D0301 Protopaja, was in cooperation with Futurice Oy and Helsinki Oodi Library.
Made by:
Khoa Lai
Jonathan Leinola
Niko Uski
Micke Häkkinen
Links:
GitHub
Final Report
Poster
{kind=link}
License:
Code: MIT-license
Other material: Creative Commons (CC BY 4.0)