

Objective
The project’s objective is to be a working prototype of a drone-mountable camera device that can find the target’s location seen through the camera. The target is located using the device’s location, the distance between the device and the target and direction of the camera. The device will be wirelessly communicating with the ground station, in this case a commercial laptop, through which a human user can control the camera. A GPS module is used to find the location of the device. The distance between the device and the target is found with a laser distance finder attached to the camera. The direction of the camera and the laser finder is found with the combination of a compass, which gives the horizontal angle, and the tilt sensor of the laser rangefinder, which gives the vertical angle. The location of the target is shown to the user. The user does not need to have experience with drone flying or with the system itself to use it properly. The system should work in clear weather up to 600- meter distances.
Hardware Design
The system consists of a drone-mounted air unit and a portable ground control station. The air unit is equipped with a Raspberry Pi Compute Module 4, a 12MP camera, laser rangefinder, GPS, IMU sensors (including a magnetometer and pressure sensor), and custom-built PCBs that handle communication and data processing. The laser rangefinder can measure distances up to 600 meters, and theoretically up to 1000 meters, while the GPS module calculates the target’s coordinates. The entire unit is powered by a 7.4V LiPo battery, which provides ample power for extended operation. The air unit communicates wirelessly with the ground station, which receives real-time video footage and telemetry data for display and control. The PCB design includes modular components to reduce costs, with an emphasis on size and weight to ensure that the unit remains under the 1kg weight limit required for drone mounting.
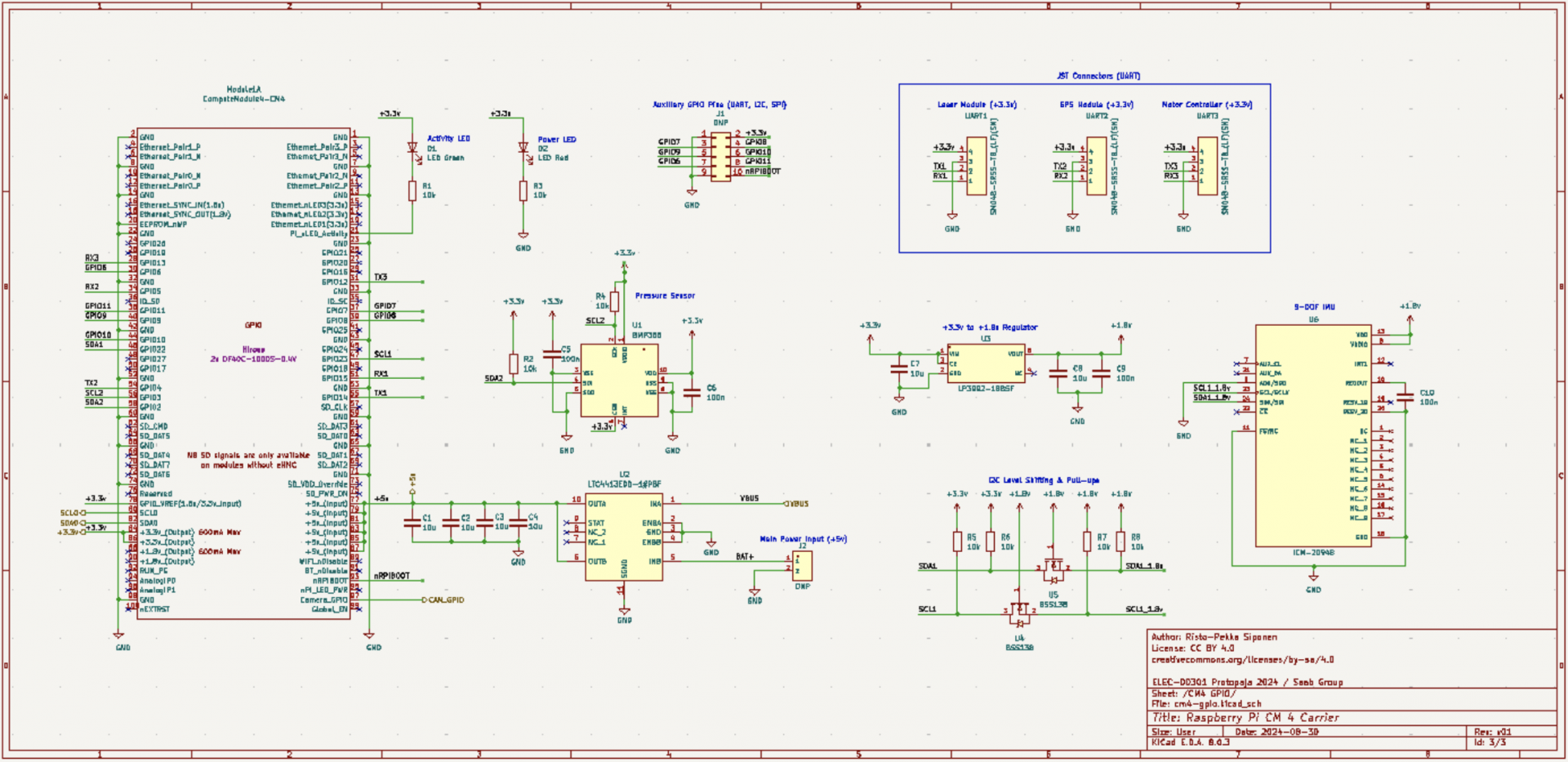
Figure 1: Main board schematic
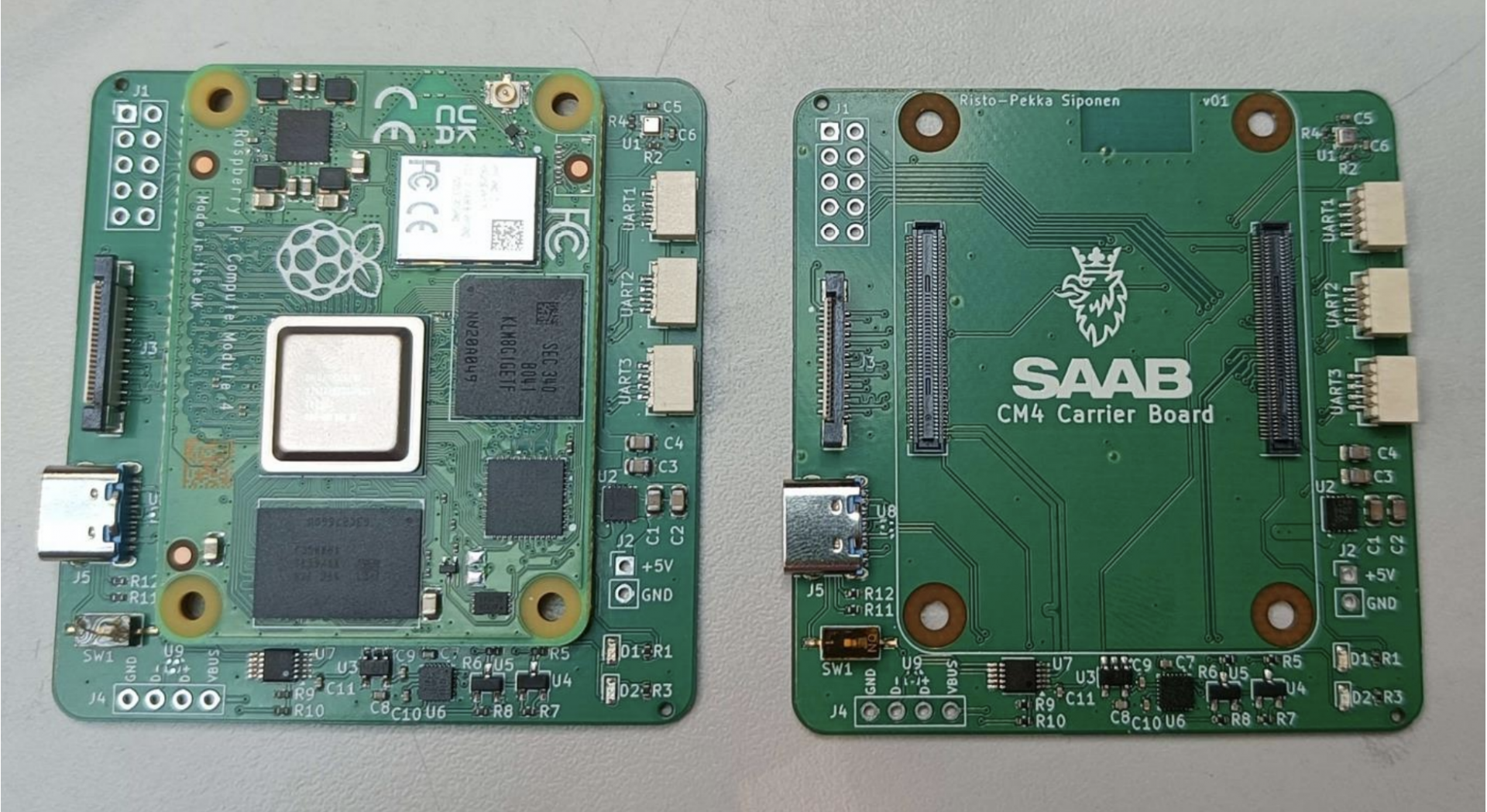
Figure 2: Finished main PCB
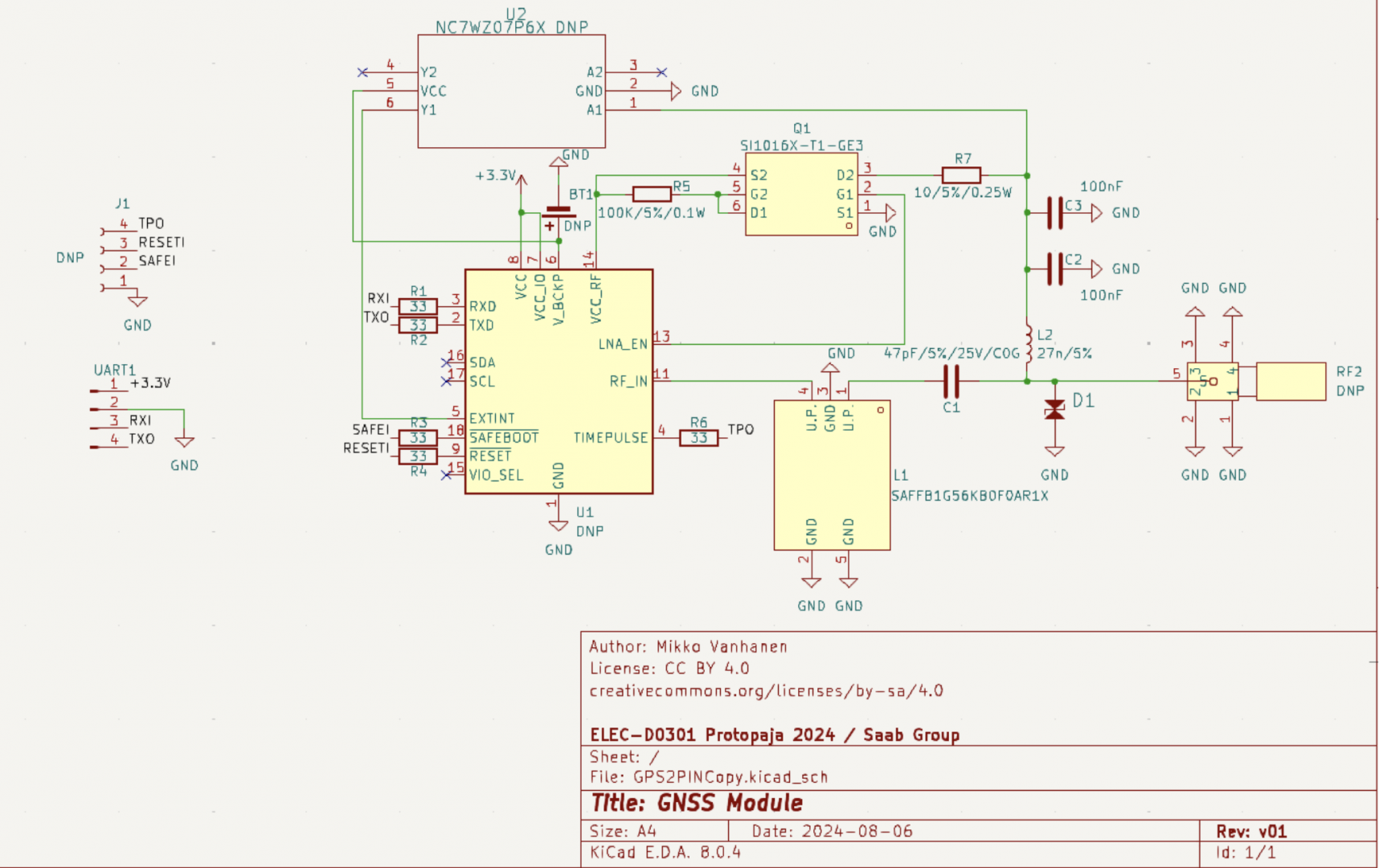
Figure 3: GNSS module schematic

Figure 4: Finished GNSS module
Enclosure Design
he enclosure was designed to be lightweight and aerodynamic, with a dome-shaped gimbal that houses the camera, rangefinder, and other internal components. The enclosure is 3D-printed from PLA and consists of several parts that can be easily assembled or disassembled. The gimbal is motorized using BLDC motors with magnetic encoders, providing precise control and stability of the camera. The ball-shaped design minimizes drag and provides protection for the electronics inside. Challenges included the friction caused by wire routing and fitting all the components into a small space. The design process involved iterations to balance structural strength, aerodynamics, and ease of access for future modifications or repairs.
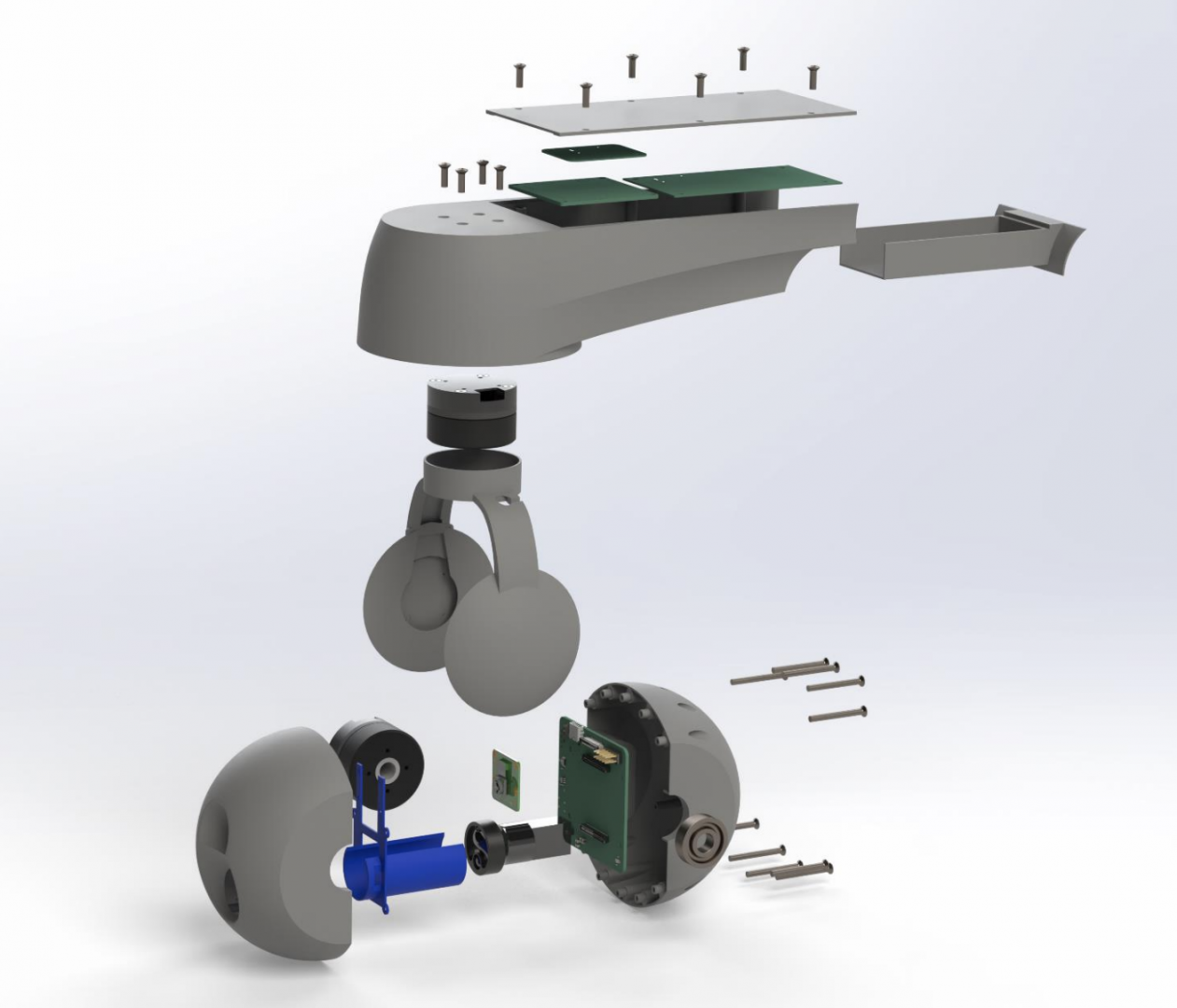
Figure 5: Explosion view of the prototype
Software
Files
Team Members
-
- Topias Malinen
- Risto-Pekka Siponen
- Ilia Lebedev
- Mikko Vanhanen
- Elmeri Huikko
License: MIT License